AED 85.05
Description
The BTS7960 Motor Driver Module is a powerful and compact dual H-bridge motor driver that is capable of controlling large DC motors with a voltage range of 5V to 27V and a maximum current of 43A. It uses PWM (pulse width modulation) signals to control the speed and direction of the motors and includes various safety features, such as over-temperature and over-current protection. The module is commonly used in robotics and automation applications where precise motor control is required.
Package Includes:
- 1 x BTS7960 Motor Driver Module
Features:
- Dual H-bridge motor driver with a voltage range of 5V to 27V
- Maximum continuous current of 43A per channel
- Bi-directional control of two DC motors or a single bipolar stepper motor
- PWM frequency range of up to 25kHz
- Two independent current-sensing channels for over-current and over-temperature protection
- Compact design with screw terminals for easy connection
- Digital inputs for controlling motor speed and direction
- Suitable for robotics, automation, and other high-power motor control applications.
Description:
The BTS7960 Motor Driver Module is a robust and versatile motor driver module designed for controlling high-power DC motors. It is based on the BTS7960B H-bridge driver IC and offers a maximum continuous current of 43A per channel with a voltage range of 5V to 27V. The module features two H-bridge circuits that allow bi-directional control of two DC motors or a single bipolar stepper motor. It uses pulse width modulation (PWM) signals to adjust the motor speed and direction with a frequency range of up to 25kHz. The module includes two independent current-sensing channels that enable the module to provide over-current and over-temperature protection, which can prevent damage to the module or connected components. The BTS7960 Motor Driver Module has a compact design with screw terminals for connecting motors and power supplies. It also includes four digital inputs for controlling the direction and speed of the motors The module is commonly used in robotics, automation, and other applications that require high-performance motor control. It is easy to use and can be controlled by a microcontroller or other digital circuits. The module's high current rating and safety features make it an ideal choice for driving large DC motors or stepper motors in industrial, automotive, or other high-power applications.
Principle of Work:
The BTS7960 Motor Driver Module is based on the BTS7960B H-bridge driver IC, which allows bi-directional control of DC motors or bipolar stepper motors. The module consists of two H-bridge circuits, one for each motor channel, which can be controlled using digital signals from a microcontroller or other control circuit. To control the speed and direction of a motor, the module uses pulse width modulation (PWM) signals. The duty cycle of the PWM signal determines the motor speed, while the direction is determined by the logic level of two digital input pins. When the PWM signal is applied to one of the H-bridge circuits, the module switches the output of the circuit between the positive and negative supply voltage, which creates a voltage across the motor terminals. By varying the duty cycle of the PWM signal, the average voltage across the motor can be controlled, and hence the motor speed. The module also includes two independent current-sensing channels that can detect over-current or over-temperature conditions. If the current or temperature exceeds a set threshold, the module will disable the H-bridge circuit to protect the module and the connected motor.
Pinout of the Module:

Pin Headers:
- VCC: Module power supply – 5V
- GND: Ground
- IS-R: Input signal for detecting high current – Straight rotation
- IS-L: Input signal for detecting high current – Inverse rotation
- EN-R: Output Signal for controlling motor direction – Straight rotation
- EN-L: Output Signal for controlling motor direction – Inverse rotation
- WM-R: PWM Signal for controlling motor speed – Straight rotation
- PWM-L: PWM Signal for controlling motor speed – Inverse rotation
Check the Diagram for more info
Screw Terminals:
- 1: Motor A output
- 2: Motor A output
- 3: Motor B output
- 4: Motor B output
Note that the polarity of the motor connections depends on the direction control input. When the direction input is low, the motor output terminals 1 and 3 are connected to the positive motor power supply input (G pinheader). When the direction input is high, the motor output terminals 2 and 4 are connected to the positive motor power supply input.
Applications:
- Robotics: The module is commonly used in robotics applications to control the movement of high-power DC motors or stepper motors.
- Automation: It can be used in automation applications such as conveyor belts, production lines, and other industrial processes that require high-power motor control.
- Electric vehicles: The BTS7960 module can be used in electric vehicle applications to control the speed and direction of the electric motor.
- CNC machines: It can be used in CNC machines to control the movement of stepper motors that drive the spindle and other axes.
- Home automation: The module can be used in home automation projects to control the movement of motorized blinds, curtains, and other appliances.
Circuit:
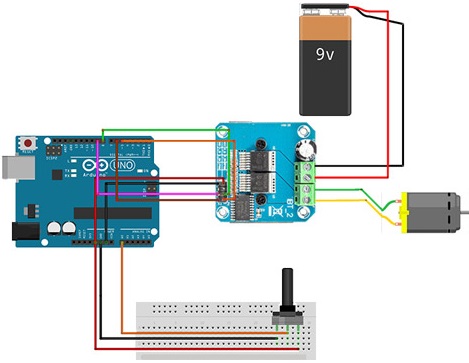
- BTS7960-43A-Driver module's (LPWM)pinheader is connected to Arduino's pin 6 for controlling the PWM input of the left DC motor.
- BTS7960-43A-Driver module's (REN) pinheader is connected to Arduino's pin 8 for controlling the direction input of the right DC motor.
- BTS7960-43A-Driver module's (RPWM)pinheader is connected to Arduino's pin 5 for controlling the PWM input of the right DC motor.
- BTS7960-43A-Driver module's (LEN)pinheader is connected to Arduino's pin 9 for controlling the direction input of the left DC motor.
- A potentiometer is connected to Arduino's analog pin A0 to control the speed of the motors.
- The BTS7960-43A-Driver module's logic power supply input (pin E) is connected to Arduino's 5V pin.
- The BTS7960-43A-Driver module's motor power supply input (pin G and H) is connected to an external power supply between 5V to 27V.
- Two DC motors are connected to the BTS7960-43A-Driver module's motor output terminals 1-2 and 3-4.
Library:
No Library Needed
Code:
This code is for controlling a motor driver module (the BTS7960) using a potentiometer connected to an analog input pin on an Arduino board.
#define RIGHT_PWM 5
#define LEFT_PWM 6
#define RIGHT_EN 8
#define LEFT_EN 9
int potentiometerValue;
int rightMotorSpeed;
int leftMotorSpeed;
void setup() {
Serial.begin(9600);
pinMode(RIGHT_PWM,OUTPUT);
pinMode(LEFT_PWM,OUTPUT);
pinMode(LEFT_EN,OUTPUT);
pinMode(RIGHT_EN,OUTPUT);
digitalWrite(RIGHT_EN,HIGH);
digitalWrite(LEFT_EN,HIGH);
}
void loop() {
potentiometerValue=analogRead(A0);
if(potentiometerValue>512){
rightMotorSpeed=map(potentiometerValue,512,1023,0,255);
analogWrite(RIGHT_PWM,rightMotorSpeed);
analogWrite(LEFT_PWM,0);
}
if(potentiometerValue<512){
leftMotorSpeed=map(potentiometerValue,512,0,0,255);
analogWrite(LEFT_PWM,leftMotorSpeed);
analogWrite(RIGHT_PWM,0);
}
}
The code reads the analog value of the potentiometer and adjusts the motor speed accordingly. If the potentiometer value is greater than 512, the code sets the right motor speed to a value mapped from 0 to 255 based on the potentiometer value and sets the left motor speed to 0. If the potentiometer value is less than 512, the code sets the left motor speed to a value mapped from 0 to 255 based on the potentiometer value and sets the right motor speed to 0. This creates a differential drive system where the motor speeds are controlled by a single potentiometer.
Technical Details:
- Maximum operating voltage: 27V
- Maximum continuous current per channel: 43A
- Peak current per channel: 100A
- On-state voltage drop at 25°C: 1.8V
- PWM frequency: up to 25kHz
- Standby current: <1mA
- Operating temperature range: -40°C to +150°C
- Dimensions: 53mm x 43mm x 27mm
- Weight: 34g
Resources:
Comparisons:
The BTS7960 and A4988 motor driver modules have some similarities and differences in terms of their features and usage. Here are some comparisons:
Similarities:
- Both modules can drive stepper motors and DC motors.
- Both modules use pulse-width modulation (PWM) to control motor speed.
- Both modules can handle a maximum voltage of around 30V.
- Both modules can be controlled by microcontrollers like Arduino.
Differences:
- Maximum continuous current: The BTS7960 can handle up to 43A per channel, while the A4988 can handle up to 2A per channel. This means that the BTS7960 is better suited for high-power motors, while the A4988 is more suitable for lower-power motors.
- Control method: The BTS7960 uses two input signals (one for each motor channel) to control motor direction and speed, while the A4988 uses a step and direction input to control the motor.
- Microstepping: The A4988 can perform microstepping (dividing a single step into smaller steps) to achieve smoother motion and higher precision, while the BTS7960 cannot perform microstepping.
- Heat dissipation: The BTS7960 has a larger heat sink and can handle a higher current, which means it generates more heat than the A4988. This may require additional heat dissipation measures like fans or heat sinks.
- Price: The BTS7960 is generally more expensive than the A4988 due to its higher current handling capacity.
The BTS7960 is better suited for high-power motors that require more current, while the A4988 is more suitable for low-power motors that require more precise control.