AED 325.00
Description
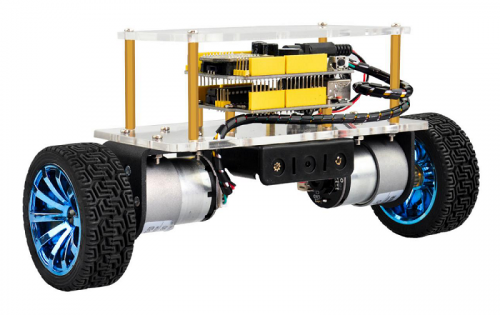
The Keyestudio balance car kit allows you to build a mini balance car based on the Arduino development platform. The kit uses an UNO R3 as the core and a balance shield with a built-in MPU-6050 to test the car's body posture. It features Bluetooth connectivity, which is compatible with the Bluetooth XBee module for Android systems. The Bluetooth connection allows control of the car's movement using a Bluetooth app that offers both key and gravity control modes. The app also supports adjusting the balance angle and PID parameters. The kit includes all necessary assembly components and detailed instructions for installation and debugging.
The self-balancing car maintains its balance through dynamic balance, using the movement of its wheels driven by two DC motors. The control tasks are divided into three main parts:
- Balance Control: Keeps the car upright and balanced by controlling the wheel's rotation.
- Speed Control: Manages the car's movement and speed by controlling its inclination, achieved by adjusting the motor speed.
- Direction Control: Controls steering by adjusting the speed difference between the two motors.
Features
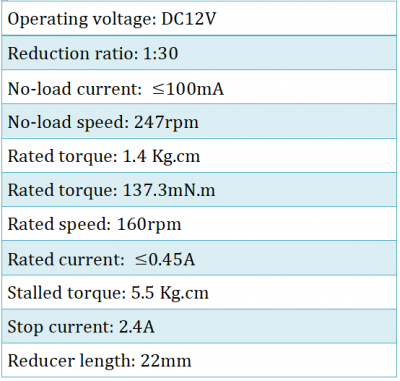
- Motor Parameters:
- Working voltage: DC 9-12V
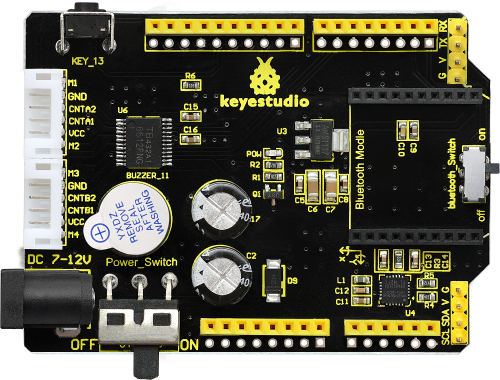
- Motor drive chip: TB6612FNG
- Body posture detection: MPU-6050
- Power control switch
- Bluetooth control switch for serial communication
- Bluetooth Connectivity:
- Compatible with Bluetooth XBee module (only for Android)
- Control the car using a Bluetooth app with key and gravity control modes
- Adjust balance angle and PID parameters
- Assembly and Debugging:
- All components included
- Detailed instructions were provided for installation and debugging
Specifications
- Motor drive chip: TB6612FNG
- Body posture detection: MPU-6050
- Working voltage: DC 9-12V
- Control modes: Key and gravity via Bluetooth app
- Adjustable parameters: Balance angle and PID
Pinout
| Pin | Function |
|---|---|
| G | Ground |
| V | Voltage |
| S | Signal |
| TX | Serial transmit |
| RX | Serial receive |
| SCL | I2C clock |
| SDA | I2C data |
| MOSI | SPI master out, slave in |
| MISO | SPI master in, slave out |
| SCK | SPI clock |
Documents
Package Includes
| No. | Components | Quantity |
|---|---|---|
| 1 | Dual-pass M3*45MM hex copper pillar | 4 |
| 2 | Dual-pass M3*10MM hex copper pillar | 4 |
| 3 | Black M4*6 cross screw | 2 |
| 4 | M3*6MM round head screw | 6 |
| 5 | M3*8MM round head screw | 10 |
| 6 | M3*8MM flat head cross screw | 4 |
| 7 | M3*12MM flat head cross screw | 2 |
| 8 | M3*12MM round head screw | 10 |
| 9 | M3 nickel plating nut | 12 |
| 10 | Acrylic plate pack of 2pcs | 1 |
| 11 | Black+blue outer diameter 68mm thickness 26mm wheel | 2 |
| 12 | GM37-520 DC gear motor with hall encoder 12V, 1:30, with type L holders | 2 |
| 13 | 6MM hole*18MM length Copper hex coupler | 2 |
| 14 | Double-head 6pin PH2.0 30CM connector wire | 2 |
| 15 | Yellow-black handle 3*40MM Phillips screwdriver | 1 |
| 16 | Type L M2 nickel plating inner hex wrench | 1 |
| 17 | 18650 3-cell AA battery case with 15CM lead+plug (battery not included) | 1 |
| 18 | Keyestudio Balance Shield V3 (black and eco-friendly) | 1 |